Design
|
Controller body
In designing the controller body, our primary objectives were that the controller should allow all natural motion of the human body, and that the position of the controller should be measurable by Arduino and copied by the follower.
In order to accomplish this first goal, we designed our links so that they were light and mobile. The link shape used can be seen in the following image. 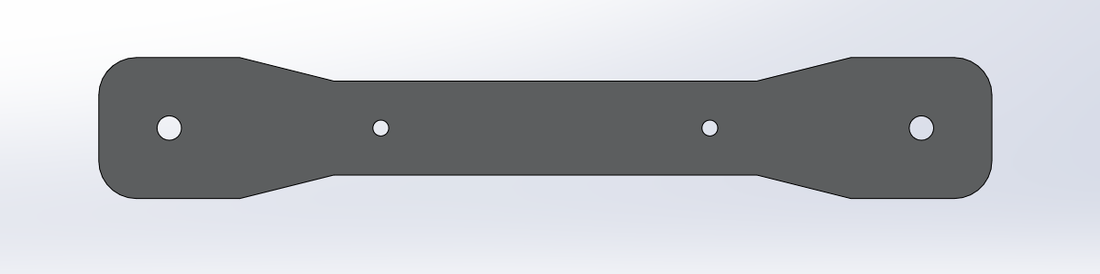
SolidWorks model of a controller robot link
The wishbone shape reduced weight yet preserved a reasonable mass moment of inertia, making the link more rigid and less prone to deformation.
The holes on either end of the link were designed to accommodate the second requirement of the link: to be measurable. Through these holes, a potentiometer shaft passes through, serving not only as the axis of rotation between links but also as a method of measuring the angular displacement and transmitting the data to the Arduino. 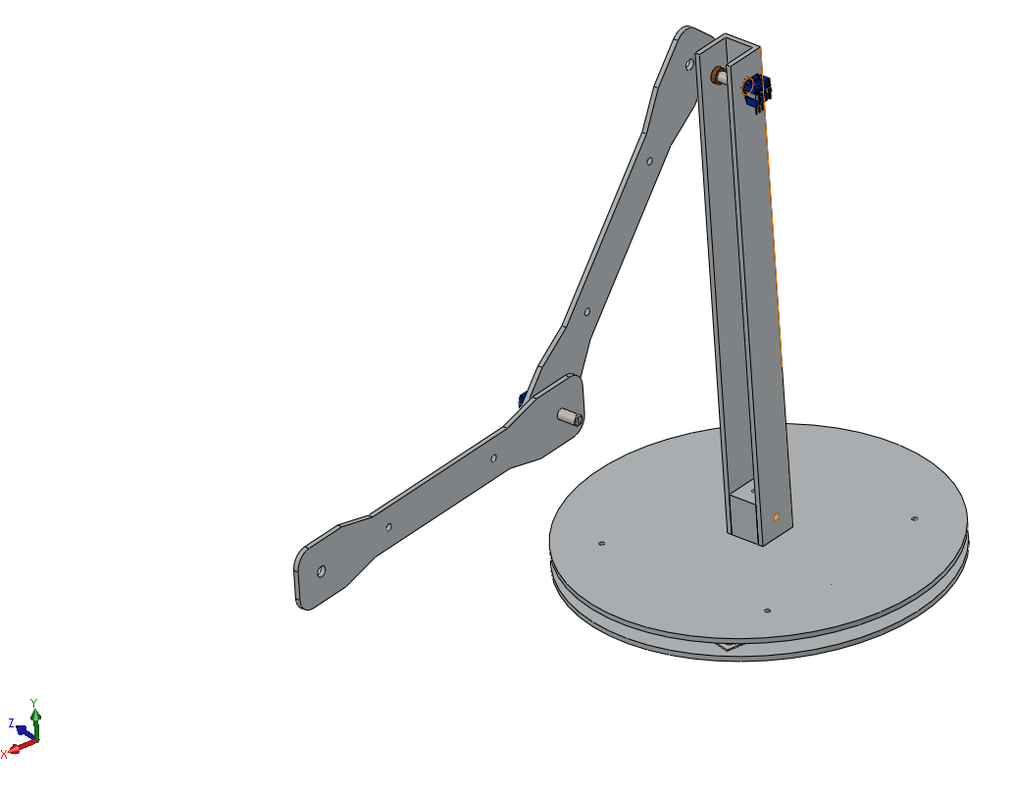
SolidWorks model of controller body with potentiometer pivots
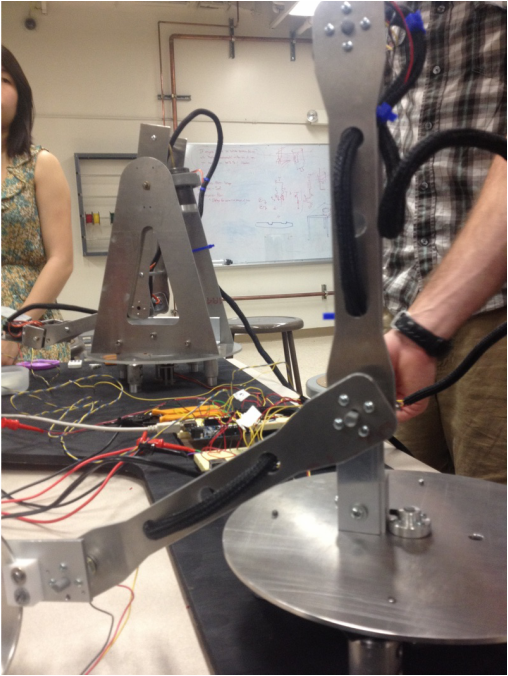
Final Controller Body
|
