Design
|
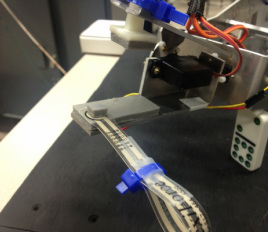
Haptic FeedbackOur primary goal for this project was to give the user a sense of handling an object on the controller side of the robot when in reality only the follower was making contact with something.
|
|
|
Design
|
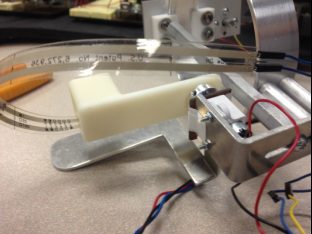
Haptic FeedbackOur primary goal for this project was to give the user a sense of handling an object on the controller side of the robot when in reality only the follower was making contact with something.
|