Design
|
Counterweight
Originally, we designed for the shoulder joint of the follower to be powered by two servos connected by a d-shaft, but we were unable to properly operate the servos simultaneously. To allow us to instead operate with only one servo we added a counterweight to alleviate the required torque.
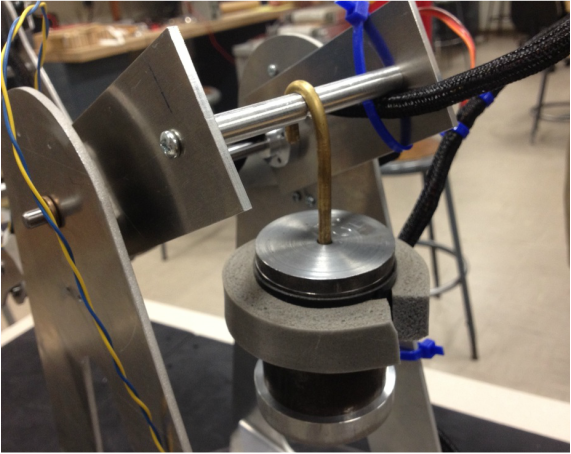
Hanging Counterweight of 2.5 lbs
|
